Modul pertama, Konsep Pneumatic dan Electro-Pneumatic.
Udara merupakan sumber daya alam yang sangat mudah diperoleh, sehingga sekarang ini banyak aplikasi teknik yang menggunakan udara sebagai penggerak untuk mengontrol berbagai peralatan. Sistem penggerak dengan udara ini disebut Pneumatic. Pada modul ini dipelajari konsep pneumatik dan aplikasi sistem kontrolnya. Pneumatic berasal dari kata “pneu” (bahasa Yunani) yang berarti udara tekan, dan “matik” yang berarti ilmu/sesuatu. Jadi, pneumatic adalah ilmu atau sesuatu yang berhubungan dengan udara bertekanan. Ada dua tipe pneumatik yang dipelajari: pneumatik murni dan electro-pneumatik. Di sini kita dapat merancang sistem pengendali pneumatik sederhana dengan dua tipe tersebut.
Perbedaan antara pneumatik murni dan electro-pneumatik adalah pada pengendalinya. Pneumatik murni menggunakan pengendali manual (tuas) menggunakan tangan, sedangakan electro-pneumatic dikendalikan dengan perangkat elektronik.
Modul kedua, Kontrol Kecepatan Motor DC Loop Tertutup dan Terbuka.
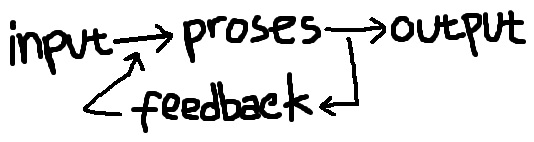
Ada dua tipe sistem kontrol pada modul ini, sistem loop tertutup dan terbuka. Metode kontrol kecepatan yang digunakan adalah dengan pengaturan tegangan armature. Pada loop tertutup, tegangan langsung diberikan ke motor. Terdapat juga umpan balik yang berfungsi membandingkan nilai input dengan output sehingga akan didapatkan selisih. Nilai selisih ini digunakan untuk menjaga sistem tetap stabil. Sedangkan pada loop terbuka, tidak terdapat umpan balik, input yang berupa tegangan langsung diberikan ke motor.
Modul ketiga, Kontrol Posisi Motor DC Loop Tertutup dan Terbuka.
Sama dengan modul yang kedua, ada dua tipe sistem kontrol yang digunakan, loop tertutup dan terbuka. Di modul ini dipelajari sistem pengendalian posisi. Sistem pengendalian posisi banyak digunakan di industri dan kehidupan sehari-hari. Contohnya printer, printer merupakan pengaplikasian sistem kendali posisi dengan dua sistem pengendalian, yaitu sistem pengendalian sumbu x dan sumbu y. Tapi pada modul ini yang diamati hanya satu sumbu saja.
Modul keempat, Pengendali PID dan Aplikasinya.
PID adalah pengendali yang digunakan menentukan ketelitian suatu sistem intrumentasi yang memiliki umpan balik, agar sistem tetap stabil seperti yang diinginkan. Pengendali PID merupakan yang paling banyak dipakai dalam aplikasi di dunia industri. Pengendali ini merupakan gabungan dari pengendali Propotional (P), Integral (I), dan Derivative (D). Ketiganya dapat dipakai bersamaan maupun sendiri-sendiri, tergantung dari respon yang kita inginkan dari suatu instrumentasi. Pada modul ini dipelajari tentang prinsip pengendali PID.
Pengendali Proportional:
Proportional artinya sebanding, pengendali ini memberi pengaruh yang sebanding dengan error. Perngendali ini berfungsi menambah atau mengurangi kestabilan. Semakin besar error, semakin besar pula sinyal kendali yang dihasilkan.
Pengendali Integral:
Respon pada pengendali ini lebih lambat. Pengendali ini dapat mengeluarkan respon yang memiliki error steady state (keadaan stabil) bernilai nol.
Pengendali Derivative:
Pengendali ini dapat mempercepat respon awal suatu sistem. Jadi, jika ada error, pengendali ini akan menghasilkan koreksi yang lebih cepat sebelum nilai error tersebut menjadi semakin besar.
Komentar
Posting Komentar